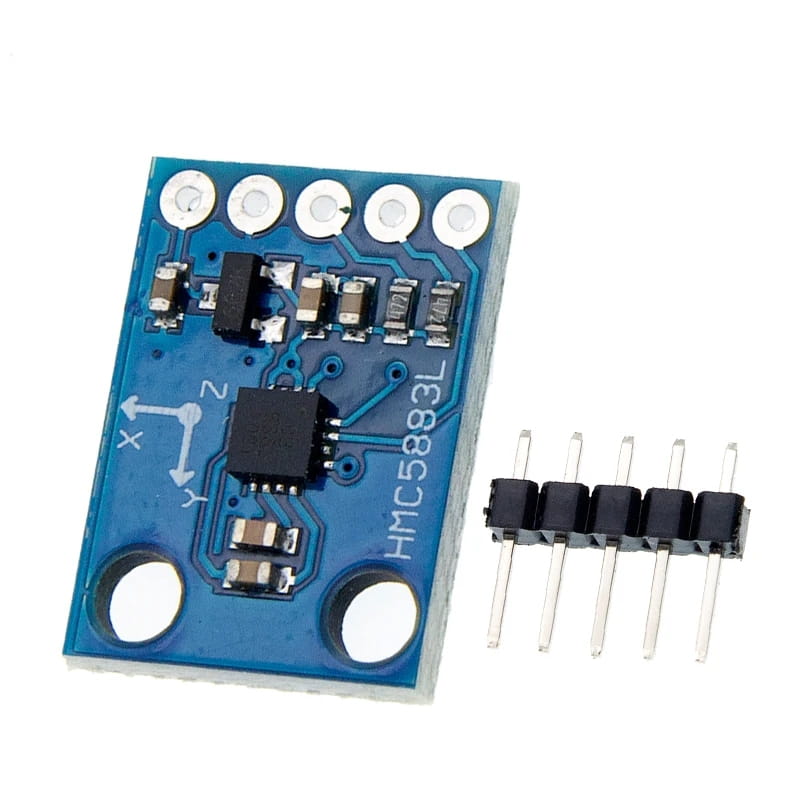
Le HMC5883L est un capteur magnétomètre 3 axes haute précision fonctionnant en I2C. Il détecte l’orientation magnétique pour vos projets Arduino, drones, robots ou systèmes de navigation.
Le HMC5883L est un capteur magnétomètre numérique à 3 axes, conçu pour détecter les variations du champ magnétique terrestre. Il est principalement utilisé comme boussole électronique dans les projets de robotique, drones, systèmes de navigation ou dispositifs portables. Ce module communique via le bus I2C et fonctionne avec des microcontrôleurs comme Arduino, ESP32, Raspberry Pi, etc.
Grâce à sa précision élevée, sa faible consommation d’énergie et sa simplicité d’intégration, le HMC5883L est un incontournable dans les systèmes de détection d’orientation et de direction.
🔧 Caractéristiques techniques
Caractéristique
Détail
Modèle
HMC5883L
Nombre d’axes
3 axes (X, Y, Z)
Interface de communication
I2C (adresse : 0x1E)
Tension de fonctionnement
3V à 5V DC
Consommation
< 100 µA en fonctionnement
Plage de mesure
±1.3 à ±8.1 Gauss
Résolution
Jusqu’à 5 milliGauss
Fréquence de mise à jour
Jusqu’à 160 Hz
Dimensions du module
Environ 13 x 18 mm
Compatibilité
Arduino, STM32, ESP8266, ESP32, etc.
📍 Applications typiques
Systèmes de navigation GPS avec orientation
Robots autonomes (orientation dans l’espace)
Drones pour maintien de cap
Boussoles électroniques
Stations météo mobiles
Cartographie et mesures de champ magnétique
🧪 Exemple d’utilisation
Vous créez un robot autonome qui doit suivre une direction donnée. Le HMC5883L vous permet de détecter le nord magnétique, et donc de corriger le cap du robot. Couplé à un module GPS, il permet d’obtenir une orientation précise même en déplacement.
🛠️ Connexion à Arduino
Voici un exemple de câblage avec Arduino Uno :
HMC5883L
Arduino Uno
VCC
5V ou 3.3V
GND
GND
SDA
A4
SCL
A5
Vous pouvez utiliser la bibliothèque « Adafruit HMC5883 Unified » ou « QMC5883L » (selon le modèle réel) pour récupérer les données et les afficher en série ou sur écran OLED.
📦 Contenu du paquet
1x Module HMC5883L
1x Connecteurs mâles (à souder selon version)
⚠️ Remarques importantes
Certains modules marqués HMC5883L sont en réalité des clones utilisant une puce QMC5883L. Le code peut nécessiter une bibliothèque différente.
Évitez de placer le capteur près de moteurs, aimants ou fils de courant, cela peut fausser les mesures.
Pour une boussole stable, combinez-le avec un accéléromètre/gyroscope (comme MPU6050).
🔁 Comparaison avec d’autres capteurs
Capteur
Type
Interface
Axes
Usage principal
HMC5883L
Magnétomètre
I2C
3
Boussole/navigation
MPU6050
Gyro + Accéléro
I2C
6
Mouvement/inertie
LSM303D
Acc + Magnéto
I2C
6
Orientation complète
BNO055
9 DoF Fusion
I2C
9
Orientation absolue
💡 Conseils pour un usage optimal
Calibrez le capteur lors de l’installation pour éviter les erreurs dues à l’environnement (hard iron / soft iron).
Combinez avec un filtrage logiciel pour lisser les mesures.
Si le capteur semble imprécis, éloignez-le des composants magnétiques ou lignes de courant fort.
🧰 En résumé
Le capteur magnétomètre HMC5883L est une solution simple et efficace pour ajouter une boussole numérique à vos projets électroniques. Facile à connecter, précis, léger et peu gourmand en énergie, il trouve sa place dans les robots, drones, dispositifs portables, ou tout projet nécessitant une orientation fiable.
Avis
Il n’y a pas encore d’avis.
Soyez le premier à laisser votre avis sur “Capteur Magnétomètre Boussole HMC5883L 3 Axes I2C 3-5V Compatible Arduino” Annuler la réponse




Avis
Il n’y a pas encore d’avis.