«Module Relais 6 Canaux 5V Compatible Arduino» a été ajouté à votre panier. Voir le panier
Promo !
Maroc, Afourar, Agadir, Aghbala, Aghbalou, Agdz, Agouraï, Aguelmous, Ahfir, Aïn Leuh, Aïn Beni Mathar, Ain Cheggag, Aïn Dorij, Aïn El Aouda, Aïn Erreggada, Aïn Harrouda, Aïn Jemaa, Aïn Karma, Aïn Taoujdate, Aït Iaaza, Aït Baha, Aït Boubidmane, Aït Daoud, Aït Ishaq, Aït Melloul, Aït Ourir, Akka, Aklim, Aknoul, Ajdir, Ajdir, Al Aaroui, Al Hoceïma, Alnif, Amalou Ighriben, Amizmiz, Aoufous, Aoulouz, Aourir, Arbaoua, Arfoud, Assa, Assahrij, Assilah, Azemmour, Azilal, Azrou, Bab Berred, Bab Taza, Bejaad, Ben Ahmed, Ben Guerir, Ben Taïeb, Ben Yakhlef, Beni Mellal, Ben Slimane, Berkane, Berrechid, Bhalil, Biougra, Bni Ansar, Bni Bouayach, Bni Chiker, Bni Drar, Bni Hadifa, Bni Tadjite, Bouanane, Bouarfa, Boudnib, Bouguedra, Bouhdila, Bouizakarne, Boujdour, Boujniba, Boulanouare, Boulemane, Boumalne Dadès, Boumia, Bouskoura, Bouznika, Bouzthate, Bradia, Brikcha, Bzou, Casablanca, Chefchaouen, Chichaoua, Dakhla, Dar Bni Karrich, Dar Chaoui, Dar El Kebdani, Dar Gueddari, Dar Ould Zidouh, Dcheïra El Jihadia, Debdou, Demnate, Deroua, Drargua, Driouch, Echemmaia, El Aïoun Sidi Mellouk, El Borouj, El Gara, El Hajeb, El Hanchane, El Jadida, El Kbab, El Kelaa des Sraghna, El Ksiba, El Mansouria, El Marsa, El Menzel, El Ouatia, Errachidia, Er-Rich, Essaouira, Es-Semara, Fam El Hisn, Farkhana, Fès, Figuig, Fnideq, Foum Jamaa, Foum Zguid, Fquih Ben Salah, Ghafsaï, Ghmate, Goulmima, Gourrama, Guelmim, Guercif, Gueznaïa, Guigou, Guisser, Had Bouhssoussen, Had Kourt, Had Oued Ifrane, Haj Kaddour, Hattane, Ifrane Atlas Saghir, Ifrane, Ighoud, Ihddaden, Imintanoute, Imouzzer Kandar, Imouzzer Marmoucha, Imzouren, Inezgane, Irherm, Issaguen, Itzer, Jebha, Jaadar, Jamaat Shaim, Jerada, Jorf, Jorf El Melha, Kalaat M'Gouna, Karia (El Jadida), Karia (Tétouan), Karia Ba Mohamed, Kariat Arekmane, Kasba Tadla, Kassita, Kattara, Kehf Nsour, Kénitra, Kerouna, Kerrouchen, Khémis Sahel, Khémisset, Khénifra, Khénichet, Khouribga, Ksar El Kébir, Laâounate, Laakarta, Laattaouia, Laayoune, Lagouira, Lakhsas, Lahraouyine, Lalla Mimouna, Lalla Takarkoust, Larache, Lakouablia, Lbir Jdid, Loualidia, Loulad, Lqliaa, Maaziz, Madagh, Marrakech, Martil, Massa, Matmata, M'Diq, Médiouna, Mechra Bel Ksiri, Mehdya, Meknès, M'Haya, Midar, Midelt, Missour, Mohammédia, Moqrisset, Moulay Abdallah, Moulay Ali Chérif, Moulay Bouazza, Moulay Bousselham, Moulay Brahim, Moulay Driss Zerhoun, M'Rirt, Nador, Naïma, Nouaceur, Ouaouizeght, Ouarzazate, Oued Amlil, Oued Heïmer, Oued Laou, Oued Zem, Ouezzane, Ouislane, Oujda, Oulad Abbou, Oulad Amrane, Oulad Ayad, Oulad Berhil, Oulad Frej, Oulad Ghadbane, Oulad H'Riz Sahel, Oulad M'Barek, Oulad Mrah, Oulad Saïd, Oulad Tayeb, Oulad Teïma, Oulad Yaïch, Oulad Zbaïr, Oulmès, Oum El Guerdane, Ounagha, Outat El Haj, Rabat, Ras El Aïn, Ras El Ma, Ribate El Kheïr, Rommani, Sabaa Aiyoun, Safi, Saïdia, Salé, Sebt El Guerdane, Sebt El Maarif, Sebt Gzoula, Sebt Jahjouh, Sefrou, Selouane, Settat, Sid L'Mokhtar, Sid Zouin, Sidi Abdallah Ghiat, Sidi Addi, Sidi Ahmed, Sidi Ali Ban Hamdouche, Sidi Allal El Bahraoui, Sidi Allal Tazi, Sidi Bennour, Sidi Bou Othmane, Sidi Boubker, Sidi Bouknadel, Sidi Bouzid, Sidi Kacem, Sidi Hajjaj Oulad Mrah, Sidi Ifni, Sidi Jaber, Sidi Lyamani, Sidi Rahhal, Sidi Rahhal Chataï, Sidi Slimane, Sidi Slimane Echcharraa, Sidi Smaïl, Sidi Taïbi, Sidi Yahya El Gharb, Skhirate, Skhour Rehamna, Skoura, Smimou, Soualem, Souk El Arbaâ, Souk Sebt Oulad Nemma, Tabounte, Tafetachte, Tafraout, Tafrisset, Taghjijt, Tahannaout, Tahla, Taïnaste, Talmest, Taliouine, Talsint, Tamallalt, Tamanar, Tamassint, Tamegroute, Tameslouht, Tanger, Tan-Tan, Taounate, Tarfaya, Targuist, Taourirt, Taroudant, Tata, Taza, Taznakht, Témara, Temsia, Tendrara, Tétouan, Thar Es Souk, Tidass, Tiflet, Tighassaline, Tighza, Timahdite, Tinejdad, Tinghir, Tissa, Tit Mellil, Tizi N'Test, Tizi Ouasli, Tiznit, Tiztoutine, Touima, Touissit, Toulal, Tounfite, Youssoufia, Zag, Zagora, Zaïda, Zaïo, Zaouïat Bougrine, Zaouïat Cheikh, Zeghanghane, Zemamra, Zirara, Zoumi, Zrarda
Livraison dans toutes les villes du Maroc
Maroc, Afourar, Agadir, Aghbala, Aghbalou, Agdz, Agouraï, Aguelmous, Ahfir, Aïn Leuh, Aïn Beni Mathar, Ain Cheggag, Aïn Dorij, Aïn El Aouda, Aïn Erreggada, Aïn Harrouda, Aïn Jemaa, Aïn Karma, Aïn Taoujdate, Aït Iaaza, Aït Baha, Aït Boubidmane, Aït Daoud, Aït Ishaq, Aït Melloul, Aït Ourir, Akka, Aklim, Aknoul, Ajdir, Ajdir, Al Aaroui, Al Hoceïma, Alnif, Amalou Ighriben, Amizmiz, Aoufous, Aoulouz, Aourir, Arbaoua, Arfoud, Assa, Assahrij, Assilah, Azemmour, Azilal, Azrou, Bab Berred, Bab Taza, Bejaad, Ben Ahmed, Ben Guerir, Ben Taïeb, Ben Yakhlef, Beni Mellal, Ben Slimane, Berkane, Berrechid, Bhalil, Biougra, Bni Ansar, Bni Bouayach, Bni Chiker, Bni Drar, Bni Hadifa, Bni Tadjite, Bouanane, Bouarfa, Boudnib, Bouguedra, Bouhdila, Bouizakarne, Boujdour, Boujniba, Boulanouare, Boulemane, Boumalne Dadès, Boumia, Bouskoura, Bouznika, Bouzthate, Bradia, Brikcha, Bzou, Casablanca, Chefchaouen, Chichaoua, Dakhla, Dar Bni Karrich, Dar Chaoui, Dar El Kebdani, Dar Gueddari, Dar Ould Zidouh, Dcheïra El Jihadia, Debdou, Demnate, Deroua, Drargua, Driouch, Echemmaia, El Aïoun Sidi Mellouk, El Borouj, El Gara, El Hajeb, El Hanchane, El Jadida, El Kbab, El Kelaa des Sraghna, El Ksiba, El Mansouria, El Marsa, El Menzel, El Ouatia, Errachidia, Er-Rich, Essaouira, Es-Semara, Fam El Hisn, Farkhana, Fès, Figuig, Fnideq, Foum Jamaa, Foum Zguid, Fquih Ben Salah, Ghafsaï, Ghmate, Goulmima, Gourrama, Guelmim, Guercif, Gueznaïa, Guigou, Guisser, Had Bouhssoussen, Had Kourt, Had Oued Ifrane, Haj Kaddour, Hattane, Ifrane Atlas Saghir, Ifrane, Ighoud, Ihddaden, Imintanoute, Imouzzer Kandar, Imouzzer Marmoucha, Imzouren, Inezgane, Irherm, Issaguen, Itzer, Jebha, Jaadar, Jamaat Shaim, Jerada, Jorf, Jorf El Melha, Kalaat M'Gouna, Karia (El Jadida), Karia (Tétouan), Karia Ba Mohamed, Kariat Arekmane, Kasba Tadla, Kassita, Kattara, Kehf Nsour, Kénitra, Kerouna, Kerrouchen, Khémis Sahel, Khémisset, Khénifra, Khénichet, Khouribga, Ksar El Kébir, Laâounate, Laakarta, Laattaouia, Laayoune, Lagouira, Lakhsas, Lahraouyine, Lalla Mimouna, Lalla Takarkoust, Larache, Lakouablia, Lbir Jdid, Loualidia, Loulad, Lqliaa, Maaziz, Madagh, Marrakech, Martil, Massa, Matmata, M'Diq, Médiouna, Mechra Bel Ksiri, Mehdya, Meknès, M'Haya, Midar, Midelt, Missour, Mohammédia, Moqrisset, Moulay Abdallah, Moulay Ali Chérif, Moulay Bouazza, Moulay Bousselham, Moulay Brahim, Moulay Driss Zerhoun, M'Rirt, Nador, Naïma, Nouaceur, Ouaouizeght, Ouarzazate, Oued Amlil, Oued Heïmer, Oued Laou, Oued Zem, Ouezzane, Ouislane, Oujda, Oulad Abbou, Oulad Amrane, Oulad Ayad, Oulad Berhil, Oulad Frej, Oulad Ghadbane, Oulad H'Riz Sahel, Oulad M'Barek, Oulad Mrah, Oulad Saïd, Oulad Tayeb, Oulad Teïma, Oulad Yaïch, Oulad Zbaïr, Oulmès, Oum El Guerdane, Ounagha, Outat El Haj, Rabat, Ras El Aïn, Ras El Ma, Ribate El Kheïr, Rommani, Sabaa Aiyoun, Safi, Saïdia, Salé, Sebt El Guerdane, Sebt El Maarif, Sebt Gzoula, Sebt Jahjouh, Sefrou, Selouane, Settat, Sid L'Mokhtar, Sid Zouin, Sidi Abdallah Ghiat, Sidi Addi, Sidi Ahmed, Sidi Ali Ban Hamdouche, Sidi Allal El Bahraoui, Sidi Allal Tazi, Sidi Bennour, Sidi Bou Othmane, Sidi Boubker, Sidi Bouknadel, Sidi Bouzid, Sidi Kacem, Sidi Hajjaj Oulad Mrah, Sidi Ifni, Sidi Jaber, Sidi Lyamani, Sidi Rahhal, Sidi Rahhal Chataï, Sidi Slimane, Sidi Slimane Echcharraa, Sidi Smaïl, Sidi Taïbi, Sidi Yahya El Gharb, Skhirate, Skhour Rehamna, Skoura, Smimou, Soualem, Souk El Arbaâ, Souk Sebt Oulad Nemma, Tabounte, Tafetachte, Tafraout, Tafrisset, Taghjijt, Tahannaout, Tahla, Taïnaste, Talmest, Taliouine, Talsint, Tamallalt, Tamanar, Tamassint, Tamegroute, Tameslouht, Tanger, Tan-Tan, Taounate, Tarfaya, Targuist, Taourirt, Taroudant, Tata, Taza, Taznakht, Témara, Temsia, Tendrara, Tétouan, Thar Es Souk, Tidass, Tiflet, Tighassaline, Tighza, Timahdite, Tinejdad, Tinghir, Tissa, Tit Mellil, Tizi N'Test, Tizi Ouasli, Tiznit, Tiztoutine, Touima, Touissit, Toulal, Tounfite, Youssoufia, Zag, Zagora, Zaïda, Zaïo, Zaouïat Bougrine, Zaouïat Cheikh, Zeghanghane, Zemamra, Zirara, Zoumi, Zrarda
Livraison dans toutes les villes du Maroc
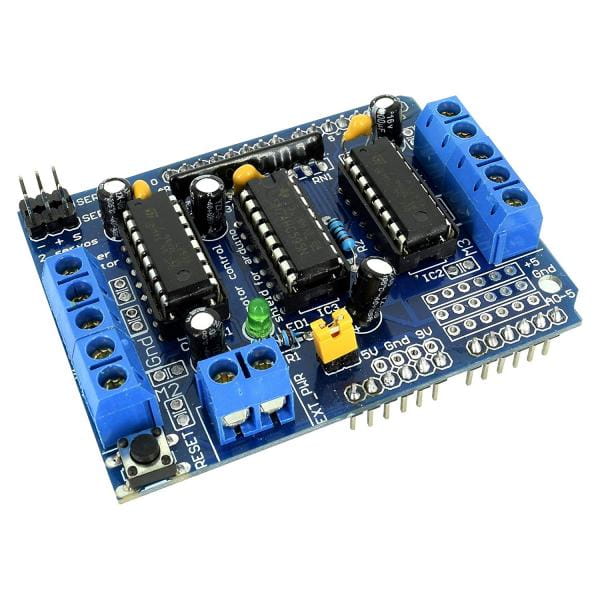
L293D Driver de moteur
70,00د.م.Le prix initial était : 70,00د.م..60,00د.م.Le prix actuel est : 60,00د.م..
Le L293D est un driver de moteur double canal en pont H, permettant de contrôler deux moteurs DC ou un moteur pas-à-pas avec Arduino, idéal pour la robotique.
Le driver de moteur L293D est un circuit intégré très populaire, utilisé pour piloter des moteurs DC et des moteurs pas-à-pas dans l’électronique embarquée, la robotique, et les projets Arduino. Ce composant en pont H vous permet de gérer à la fois la vitesse et le sens de rotation de deux moteurs à courant continu, ou d’un moteur pas-à-pas bipolaire.
Grâce à sa compacité, sa simplicité d’intégration et sa grande compatibilité avec Arduino, le L293D est un choix privilégié pour les étudiants, makers et développeurs.
Caractéristiques techniques principales
Type : Circuit intégré en pont H quadruple demi-pont
Nombre de canaux : 2 moteurs DC ou 1 moteur pas-à-pas
Tension logique (Vss) : 4,5 V à 7 V
Tension moteur (Vs) : 4,5 V à 36 V
Courant par canal : jusqu’à 600 mA en continu
Courant pic temporaire : jusqu’à 1,2 A
Diodes de protection intégrées : oui, contre l’EMF inverse
Boîtier : DIP 16 broches
Dimensions : environ 20 mm x 10 mm
Comment fonctionne un pont H ?
Le L293D utilise une configuration en pont en H pour inverser la polarité du courant traversant le moteur. Ainsi, il devient possible de :
Changer facilement le sens de rotation du moteur
Démarrer ou arrêter la rotation
Contrôler la vitesse via modulation PWM
Chaque pont H contient 4 transistors commandés par des signaux logiques provenant d’un microcontrôleur (Arduino, ESP32, Raspberry Pi, etc.), ce qui assure un pilotage précis des moteurs.
Connexion simple avec Arduino
Voici un schéma de branchement classique pour un moteur DC :
Vcc1 (Vss) : 5 V (alimentation logique)
Vcc2 (Vs) : 6 à 12 V (alimentation moteur)
GND : masse commune
IN1 / IN2 : entrées de commande reliées aux broches Arduino
OUT1 / OUT2 : sorties vers les bornes du moteur
EN1 : activation/désactivation du moteur (5 V ou PWM)
void loop() {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW); // moteur tourne dans un sens
delay(2000);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH); // moteur tourne dans l’autre sens
delay(2000);
}
Pour varier la vitesse, connectez EN1 à une sortie PWM d’Arduino et utilisez analogWrite().
Applications courantes
Le L293D est très utilisé dans :
Voitures robotisées
Bras robotisés
Traqueurs solaires
Machines CNC ou traceurs XY
Portes automatiques
Systèmes motorisés miniatures
Robots suiveurs de ligne
Avantages du L293D
Fiable avec protection contre les pics de courant
Compact, facile à intégrer sur breadboard ou PCB
Polyvalent : contrôle moteurs DC et moteurs pas-à-pas
Très économique
Compatible avec Arduino, ESP8266, ESP32, STM32
Limitations à connaître
Courant limité à 600 mA par canal, insuffisant pour moteurs puissants
Chauffe possible lors d’une utilisation prolongée — prévoir dissipateur si besoin
Pas de retour d’information intégré (capteurs supplémentaires nécessaires)
Alternatives populaires
Modèle
Courant max
Nombre de canaux
Avantages
L293D
600 mA
2
Simple à utiliser
L298N
2 A
2
Plus puissant, module complet
TB6612FNG
1.2 A
2
Compact et efficace
DRV8833
1.5 A
2
Faible consommation, idéal Li-Ion
Conclusion
En résumé, le driver de moteur L293D est une solution efficace et abordable pour piloter des moteurs dans vos projets Arduino et robotiques. Sa configuration en pont H vous offre un contrôle précis sur la vitesse et la direction de deux moteurs DC ou d’un moteur pas-à-pas. Que vous soyez étudiant, maker ou ingénieur, le L293D constitue une base fiable pour vos applications motorisées de petite et moyenne puissance.
Avis
Il n’y a pas encore d’avis.
Soyez le premier à laisser votre avis sur “L293D Driver de moteur” Annuler la réponse




Avis
Il n’y a pas encore d’avis.